
Пожалуйста, прочитайте этот материал полностью!
Установка драйвера
Перед началом работы с устройством необходимо установить драйвер виртуального COM порта STM, если он не был установлен ранее.
Скачать
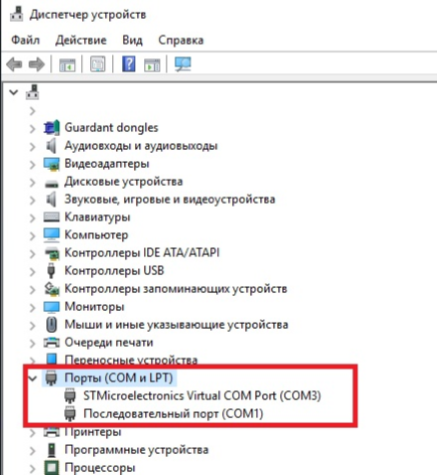
После установки драйвера и подключения интерфейса к компьютеру в диспетчере устройств в разделе Порты должно появиться устройство “STM Virtual Com Port”. Порту будет присвоен номер, например COM3, как на скриншоте ниже. Номер порта будет необходимо ввести в программе CARBUS Analyzer при подключении к интерфейсу, поэтому запомните этот номер.
Возможные проблемы при установки драйвера и методы их решения
Проблемы при установке драйвера могут возникать на старых версиях Windows XP и Windows 7. При этом в диспетчере интерфейс определяется как виртуальный COM порт, но при попытке соединиться с ним, программное обеспечение зависает, либо выдает ошибку. В этом случае обратите внимание на, что на нашем сайте доступны для загрузки два варианта драйверов, и необходимо попробовать установить версию драйвера отличную от той, которая была установлена в первую очередь. Как правило это помогает решить проблему.
Вторая проблема может заключаться в низкой скорости работы интерфейса. В этом случае принимаемые пакеты отображаются с явной задержкой. Это может является следствием того, что на компьютере устаревший контроллер USB. Решить проблему поможет использование внешнего USB хаба (разветвителя), который согласует размер пакетов интерфейса и USB контроллера материнской платы компьютера.

Для работы с интерфейсом CAN-Hacker 3.2 в качестве анализатора шин CAN и LIN необходимо скачать программное обеспечение CARBUS Analyzer на странице СКАЧАТЬ.
Затем распаковать скачанный архив.
В архиве находится как сама программа CARBUS Analyzer, так и утилита для обновления прошивок UBT (папка UBT) с папка с набором актуальных прошивок (UBT\Firmware files)
Настройка программы CARBUS Analyzer и интерфейса для работы с шиной CAN
Важные замечания:
- Если Вы новичок в работе с шиной CAN, обязательно прочтите материал по ссылке.
- Мы переходим на новую версию CarBusAnalyzer 0.8. Рекомендуем сразу начинать работу с новым программным обеспечением – ссылка.
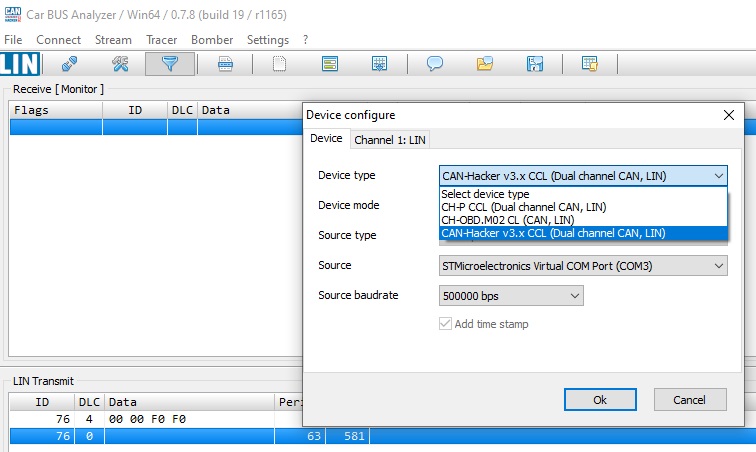
В меню Settings, в выпадающем списке Device type выбрать CAN_Hacker v 3.x
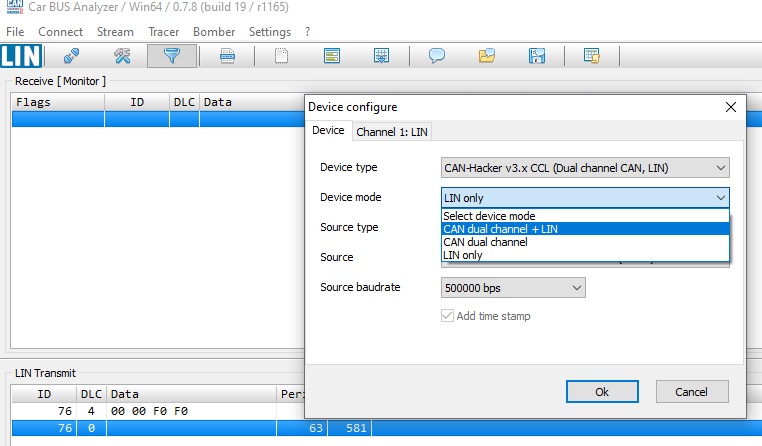
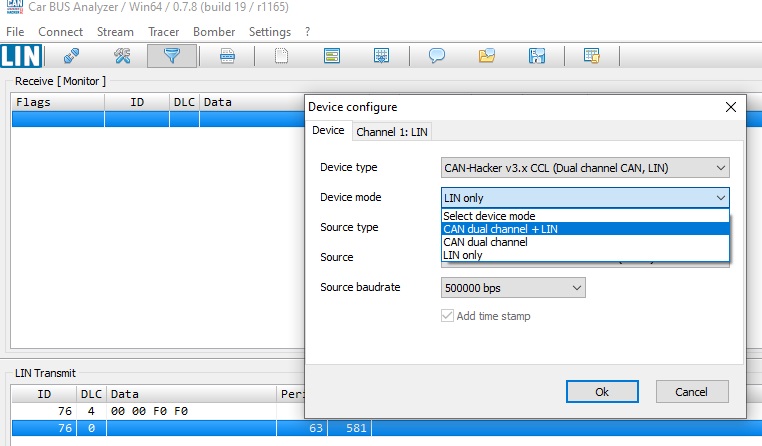
В выпадающем списке Device mode необходимо выбрать режим работы интерфейса. Доступные режимы:
- CAN Dual channel + LIN – работа с шинами CAN и LIN одновременно (опция LIN должна быть активирована)
- CAN Dual channel – работа только с шиной CAN
- LIN Only – работа только с шиной LIN (опция LIN должна быть активирована)
В выпадающем списке Source необходимо выбрать порт, на котором определяется интерфейс в системе .
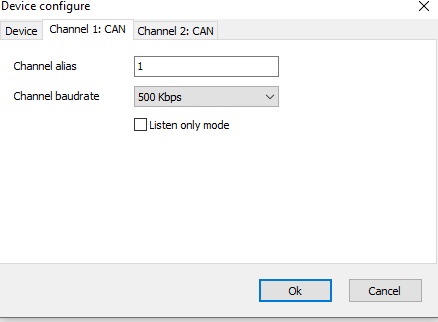
Настройка каналов CAN
Настройка каналов CAN осуществляется на вкладках Channel 1: CAN и Channel 2: CAN. Эти вкладки становятся видимой после выбора режима интерфейса для работы с шиной CAN.
Channel baudrate – задает скорость работы CAN шины.
Флаг Listen only mode – переводит интерфейс в режим Listen only, в котором теряется возможность отправки пакетов, но при приеме передаваемых по шине пакетов интерфейс не выставляет на шине флаг подтверждение приема ACK, что делает интерфейс невидимым для других устройств на шине.
В случае если тип интерфейса определен неверно или в него загружена устаревшая прошивка, то появится сообщение Invalid Device type
Подключение к CAN шине
Подключение к CAN шине осуществляется при помощи поставляемого с интерфейсом кабеля
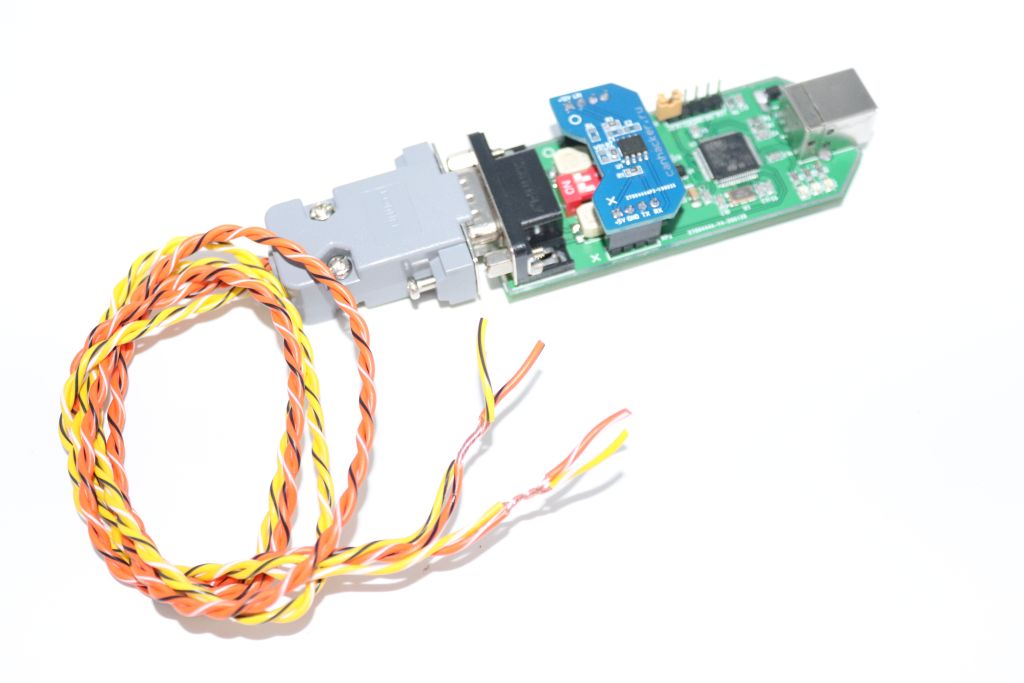
Назначение проводов:
Желтый с черной полосой – CAN-Low канал 1
Желтый с белой полосой– CAN-High канал 1
Оранжевый с черной полосой – CAN-Low канал 2
Оранжевый с белой полосой – CAN-High канал 2
Назначение переключателей на плате
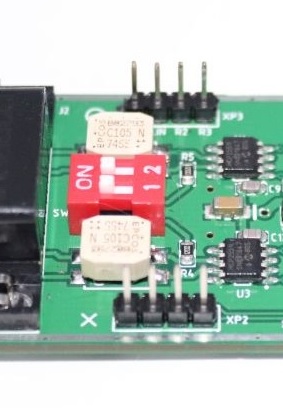
DIP переключатель на плате устройства служит для подключения резисторов терминаторов 120 Ом между линиями CAN-High и CAN-Low. В положении ON резисторы подключены.
При подключении к однопроводным шинам CAN (SWCAN – Single wire CAN, GMLAN) необходимо провод CAN-Low подключить на массу (GND) исследуемого автомобиля или блока управления, а провод CAN-High на линию SWCAN\GMLAN.
Если настройки CAN произведены верно, физическое подключение к шине верно и на шине присутствует обмен данными то после нажатия кнопки Connect в окне приема отобразятся данные передаваемые по шине CAN.
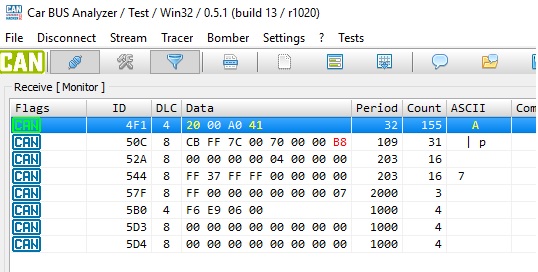
Подробное описание работы с программой CARBUS Analyzer в качестве анализатора CAN шины Вы найдете на отдельной странице – ссылка.
Работа с шиной LIN
(Должен быть установлен и активирован LIN адаптер )
Для работы с шиной LIN необходимо перевести интерфейс CAN-Hacker 3.2 в режим работы анализатора шины LIN. Для этого необходимо:
- Зайти в меню Settings
- В выпадающем списке Device type выбрать CAN-Hacker v3.x
- В выпадающем списке Device mode выбрать CAN Dual channel + LIN или LIN Only
- В выпадающем списке Source выбрать порт на котором в системе определился интерфейс.
После выбора типа и режима интерфейса необходимо:
- Перейти на вкладку Channel 1: LIN. Которая активируется после выбора режима LIN на предыдущей вкладке Device.
- В выпадающем списке Channel baudrate выбрать скорость обмена на шине LIN
- В выпадающем списке Detection time выбрать минимальную предполагаемую паузу между пакетами. Рекомендуется оставить значение по умолчанию –2 миллисекунды.
- Выбрать тип контрольной суммы. Если тип определен неверно, ничего страшного, на прием пакетов это не влияет.
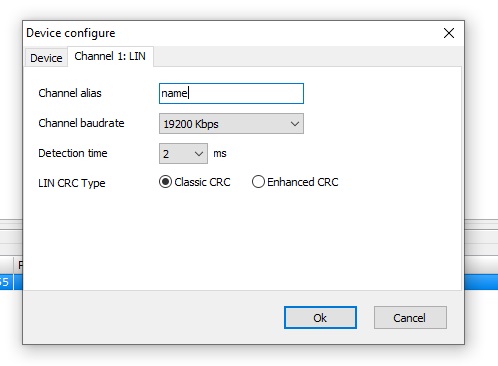
Параметр LIN CRC Type определяет тип используемой методики расчета контрольной суммы при работе с шиной LIN. На способность интерфейса принимать пакеты этот параметр не влияет. В случае если тип контрольной суммы определен неверно, то при передачи пакетов через интерфейс, принимающая сторона будет эти пакеты игнорировать.
Подключение к шине LIN осуществляется при помощи поставляемого с опцией анализатора LIN кабеля.

Назначение проводов LIN кабеля:
Красный – +12 В
Черный – Масса (GND)
Голубой – шина LIN
Либо по схеме:
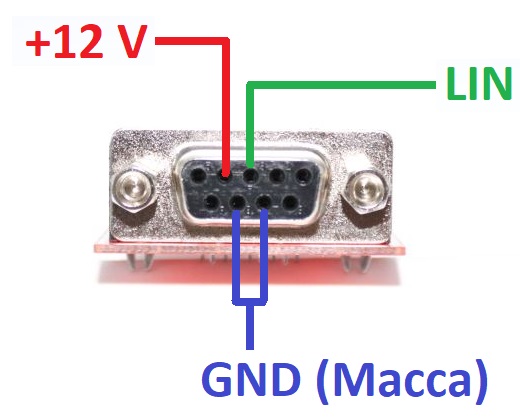
Внимание! Подключение к шине LIN исследуемого устройства или автомобиля требует обязательного подключения массы (GND) и напряжения питания +12 В.
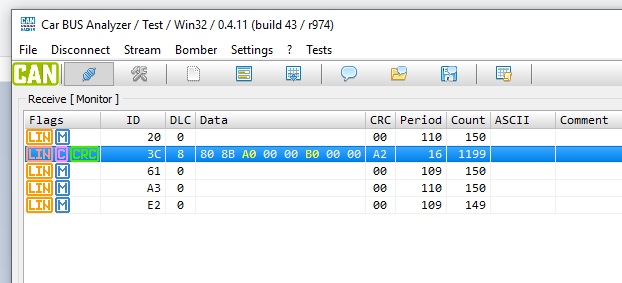
Если подключение и настройки сделаны верно и изучаемая шина LIN активна, т.е. происходит обмен данными между Master и Slave устройством, либо поступают запросы от Master узла, то в окне приема отобразятся передаваемые по шине LIN данные.
Подробное описание работы с программой CARBUS Analyzer в качестве анализатора LIN шины Вы найдете на отдельной странице – ссылка.