Особенности подключения к низкоскоростным отказоустойчивым шинам CAN – Fault tolerant CAN
Низкоскоростные отказоустойчивые CAN шины (FT-CAN) часто применяются для организации обмена данными между блоками управления отвечающими за комфорт, салон и мультимедиа сегменты CAN сетей автомобиля. ()
Fault tolerant CAN Вы можете встретить в автомобилях:
- Группа VAG – оранжевый с коричневой полосой CAN-Low, оранжевый с зеленой полосой CAN-High. Скорость 100 кбит\с
- BMW – зеленый CAN-Low, оранжевый с зеленой полосой CAN-High.
Скорость 100 кбит\с - Mercedes Benz
- KIA\Hyundai, и других.
Характеристики шины
Скорость обмена на таких шинах ограничена значением 125 kbit\s.
Кроме того существует разница в уровнях сигнала на шине.
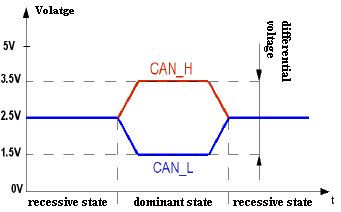
Уровень сигналов на классической шине CAN
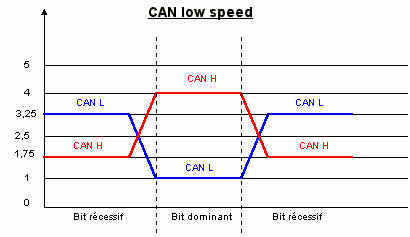
Уровень сигналов на шине FT CAN
Разница в уровнях сигналов является следствие применения на шине специальных CAN трансиверов.
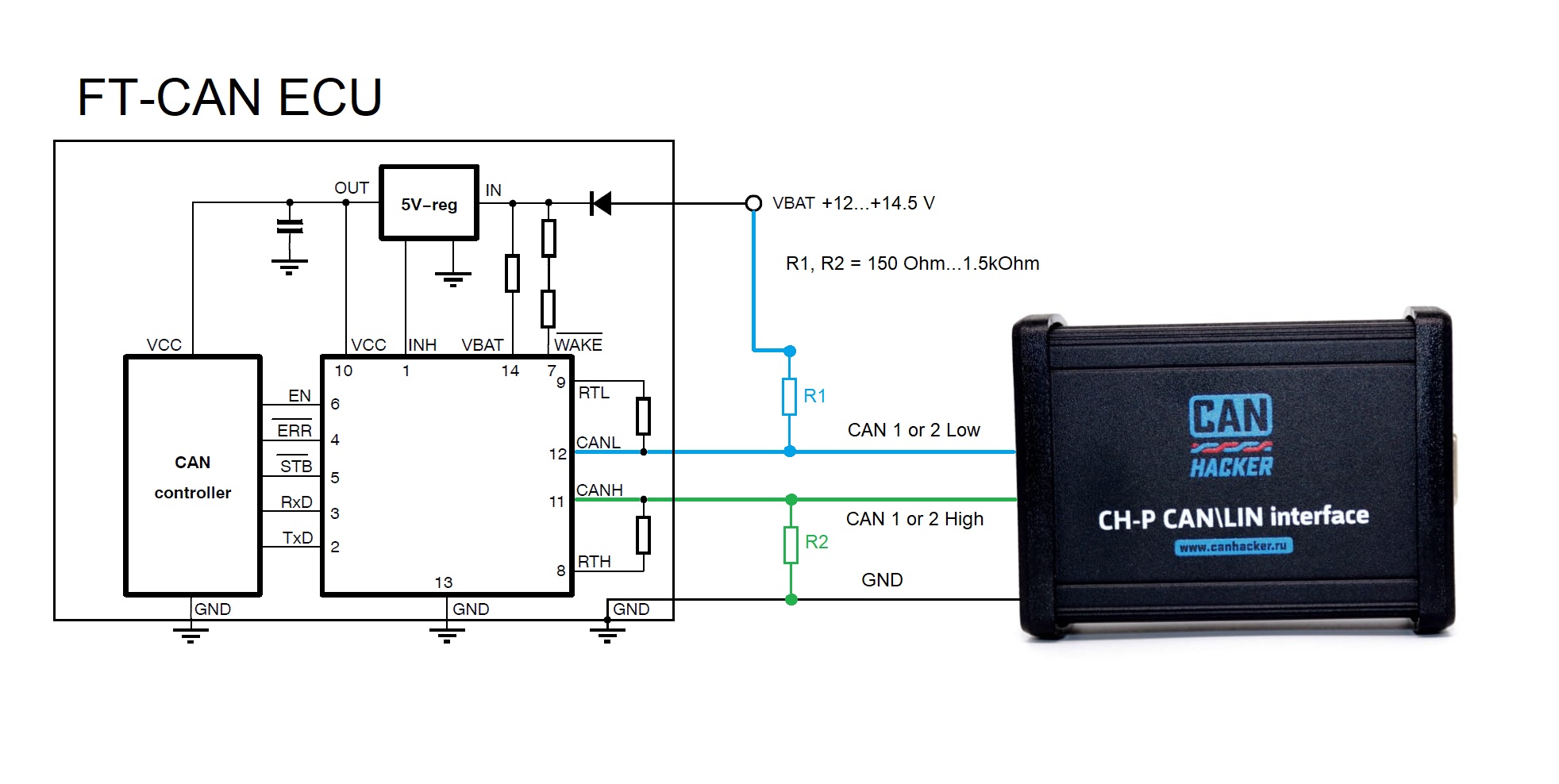
Как видно из схемы, в сети отсутствуют резисторы терминаторы 120 Ом на концах шины, а вместо них присутствуют резисторы RTL и RTH подтягивающие линию CAN-Low к напряжению питания трансивера и линию CAN-High к земле (GND). Это и обуславливает уровни сигналов на шине.
Fault tolerant трансиверы имеют важную особенность – отслеживать физические проблемы на шине и в случае их обнаружения переключаться в однопроводной режим работы.
Тем не менее Fault tolerant CAN (FT CAN) остается дифференциальной шиной и к ней можно подключать устройства и анализаторы имеющие классический High Speed трансиверы.
ВАЖНО !
- При подключении к шине FT-CAN НЕ НУЖНО подключать терминатор 120 Ом между линиями CAN-High и CAN-Low !
- При подключении только к одному блоку управления по шине FT-CAN (в отрыве от остального автомобиля) может потребоваться согласовать уровни шины путем подключения резистора сопротивлением от 150 Ом до 1 кОм между линией CAN-Low и напряжением питания блока управления 12В и между линией CAN-High и землей (массой) исследуемого блока управления.
Пример 1
Подключимся к джойстику iDrive автомобиля BMW, который связан с автомобилем посредством шины FT CAN.

Схема подключения

В этом случае линии CAN-High и CAN-Low подключаются напрямую к интерфейсу. БЕЗ подключения резисторов 120 Ом. Кроме того необходимо объединить земли (массы) интерфейса и блока iDrive (Если подключаемся к автомобилю, то объединить землю интерфейса и массу автомобиля!)
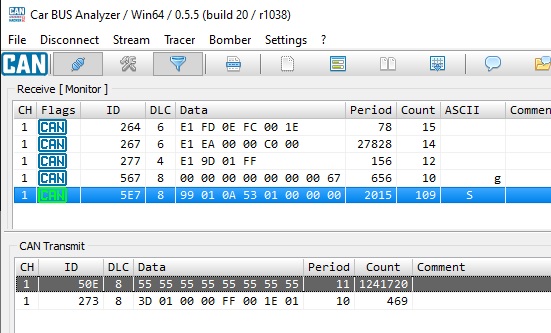
Подключимся к интерфейсу при помощи программы CARBUS Analyzer, задав скорость CAN – 100 кбит\с. После чего необходимо передавать пакет который позволит блоку iDrive “проснуться” и “не засыпать”
ID=0x50E DLC=8 DATA= 55 55 55 55 55 55 55 55 (Данные можно подобрать более точно)
Если все сделано верно то блок iDrive начнет передавать данные.
Посмотрим сигнал на шине FT-CAN. Он абсолютно нормальный. Шина работает полноценно
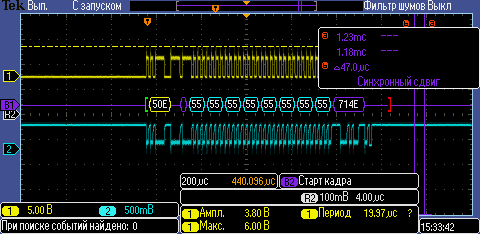
Таким образом подключение к шине FT-CAN не вызывает никаких проблем даже при использовании обычных High Speed трансиверов
Пример 2
Используем CAN-Hacker в режиме Gateway для диагностики и программирования блока управления оборудованного шиной FT-CAN.
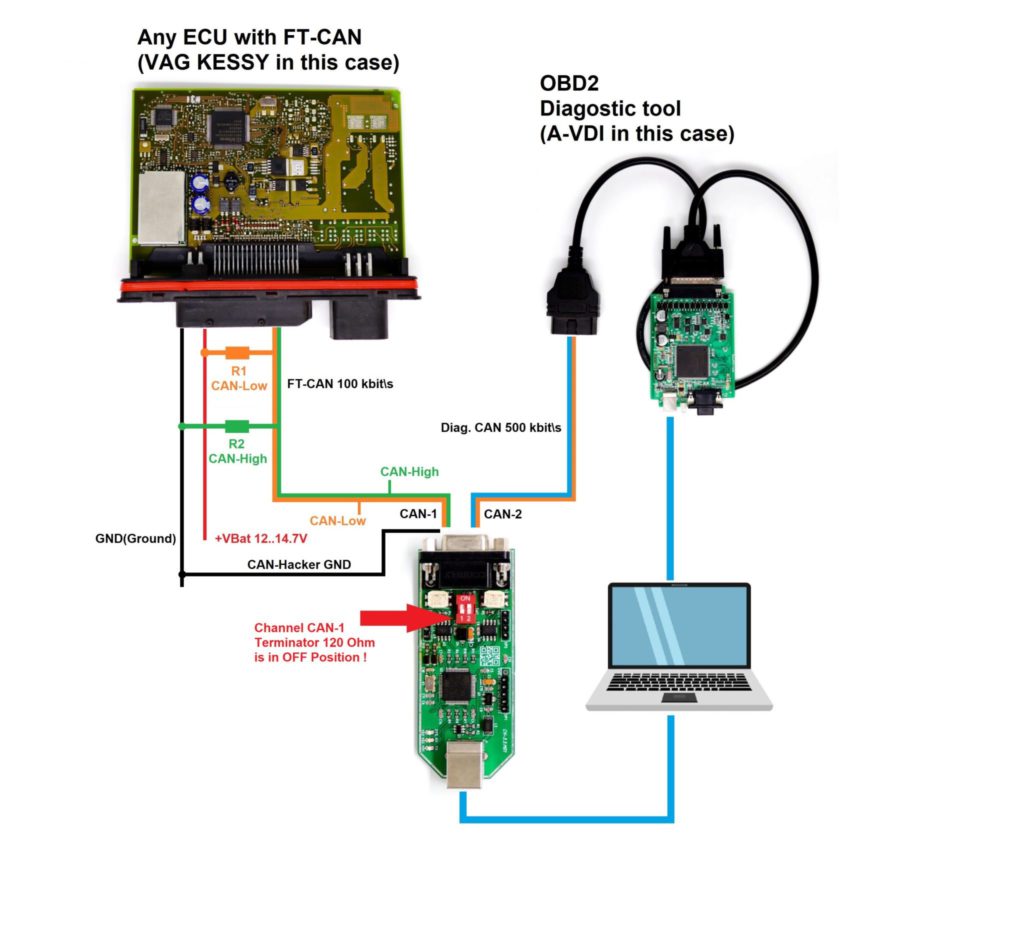
В этом примере CAN-Hacker выполняет функцию конвертера скоростей шины CAN. Блок управления KESSY от автомобилей группы VAG взаимодействует с автомобилем посредством шины FT-CAN на скорости 100кбит\с. а диагностическое оборудование работающие по протоколу UDS использует High-Speed CAN на стандартной скорости 500кбит\с.
После выполнения условий подключения описанных ниже появится возможность диагностировать и программировать с помощью оборудование которые способно работать только на скорости 500 кбит\с.
Методика подключения
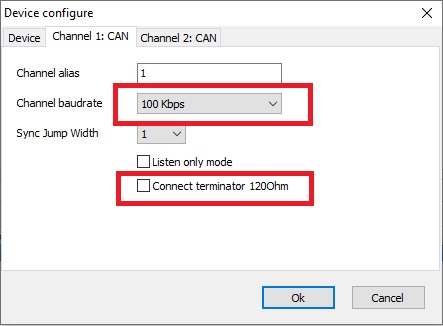
- Канал CAN-1 сконфигурирован на работу на скорости 100кбит\с и подключен к исследуемому блоку управления.
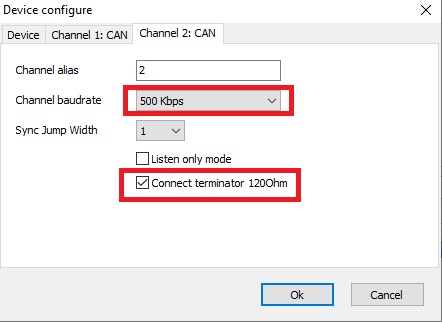
- Канал CAN-2 сконфигурирован на работу на скорости 500 кбит\с и подключен к диагностическому оборудованию.
- Терминатор 120 Ом на канале CAN-1 ОТКЛЮЧЕН.
- Терминатор 120 Ом на канале CAN-2 включен.
- Линия CAN-High канала CAN-1 при помощи внешнего резистора сопротивлением 150 Ом…1.5 кОм притянута к земле (GND, Ground, масса)
- Линия CAN-Low канала CAN-1 при помощи внешнего резистора сопротивлением 150 Ом…1.5 кОм притянута к напряжению питания блока управления (+VBat 12….14.7 Вольт)
- Земля (GND) CAN-Hacker подключена к массе исследуемого блока управления.
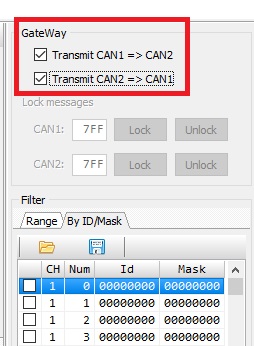
- В настройках CARBUS Analyzer, в таблице фильтров, включен режим проброса пакетов из канала CAN-1 в канал CAN-2 и наоборот.